人と触れ合うインフレータブルロボット

内圧で支えられた膜構造であるインフレータブル構造を使った軽量で大型のロボットを開発しています。用途としては、遠隔操作ロボットに豊かな身体性を与えるサイバネティクアバターとして、また、人間と直接触れ合うpHRI (physical human-robot interaction)のプラットフォームとして利用します。コンピュータによる風船構造の設計支援や自動設計にも取り組んでいます。
深層強化学習、形態計算
やわらかいロボットの変形を制御することは大きな課題です。機械学習の手法を用いたさまざまな取り組みを行なっています。シミュレータを併用し、強化学習をソフトロボットに適用して、システムが試行錯誤を通じて運動を獲得する研究を進めています。また、複雑な身体を計算資源として利用する形態計算(morphological computing)の概念に基づいて、やわらかい身体に埋め込んだセンサ群からの情報に基づいて運動生成や運動探索を行う萌芽的な研究も行なっています。
連続ロボットアーム、超冗長マニピュレータ
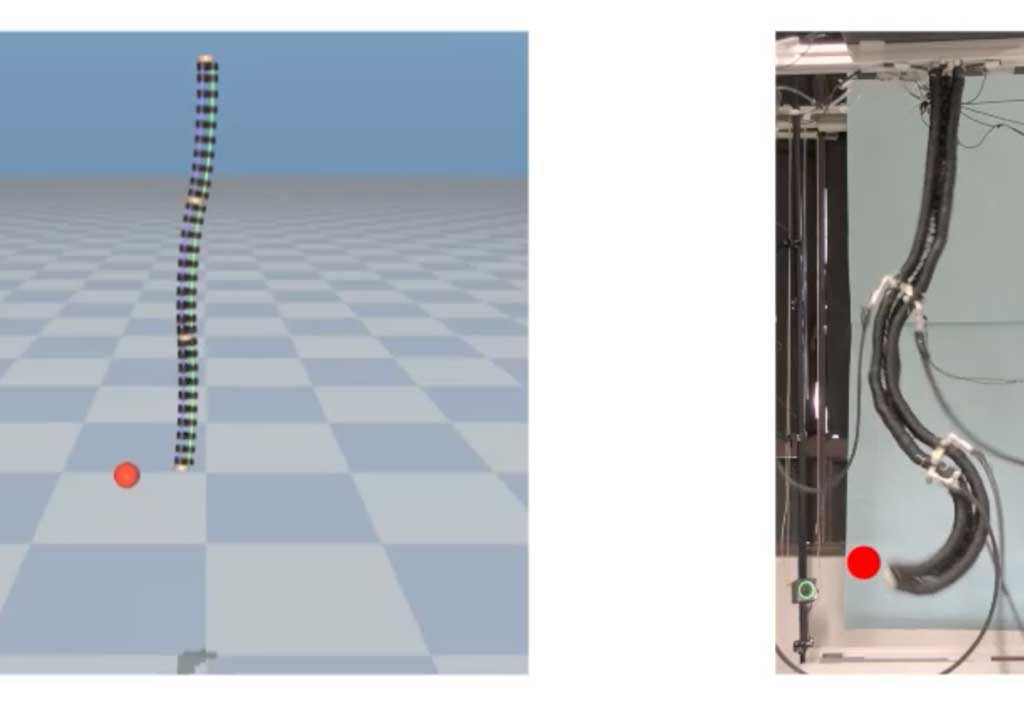
産業用ロボットアームとは異なる、独自のロボットアームを開発しています。ゾウの鼻やタコの足のように関節のないロボットアームを連続ロボットアームと呼び、狭い場所へ手を伸ばすことや、巻きつくことで物体を把持することができます。また、ダチョウのような大型鳥類の長い首にインスピレーションを得て、腕や脚とは異なる器用で巧みなロボットアームを開発しています。
インフレータブルモビリティ

インフレータブルロボットのスピンオフとして、インフレータブル構造を使った電動の乗り物を開発しています。空気を抜いて折り畳めばコンパクトになり、空気を入れると人間の体重を支えられる強度があります。ユーザーに合わせて形状をカスタマイズできることが特長です。
ソフトアクチュエータ、人工筋肉
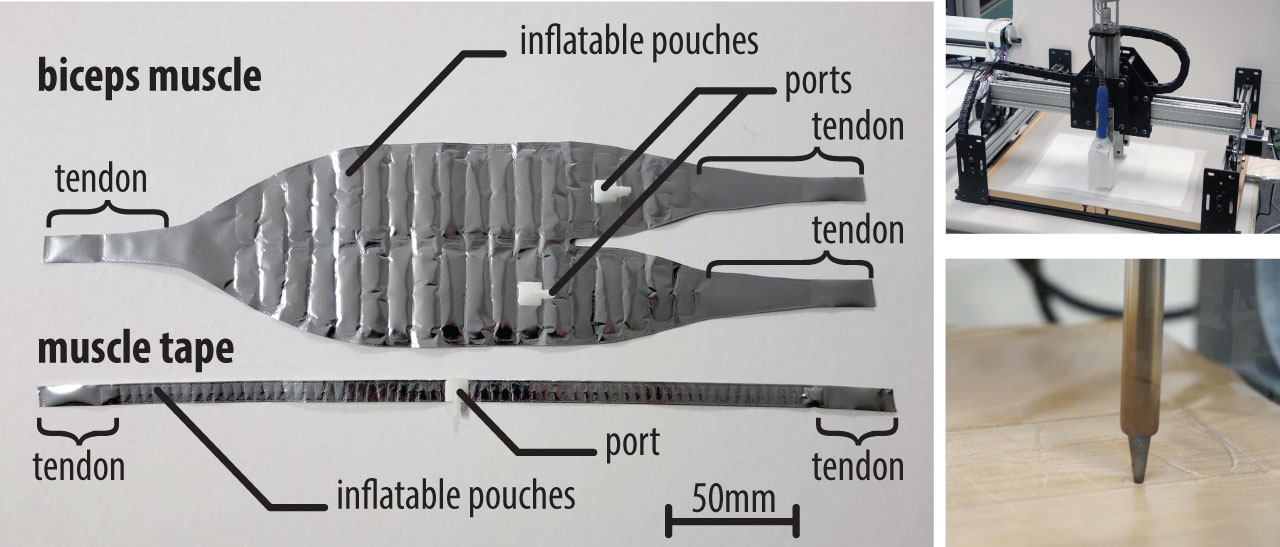
生物に学び生物を超えるロボットを目指して、空気圧人工筋肉や形状記憶合金アクチュエータを使ったさまざまな生物規範型ロボットを開発しています。筋駆動ロボット、ミミズロボット、アメーバロボットなどがその例です。また、新しい原理や機構に基づくやわらかいアクチュエータの開発を行なっています。